
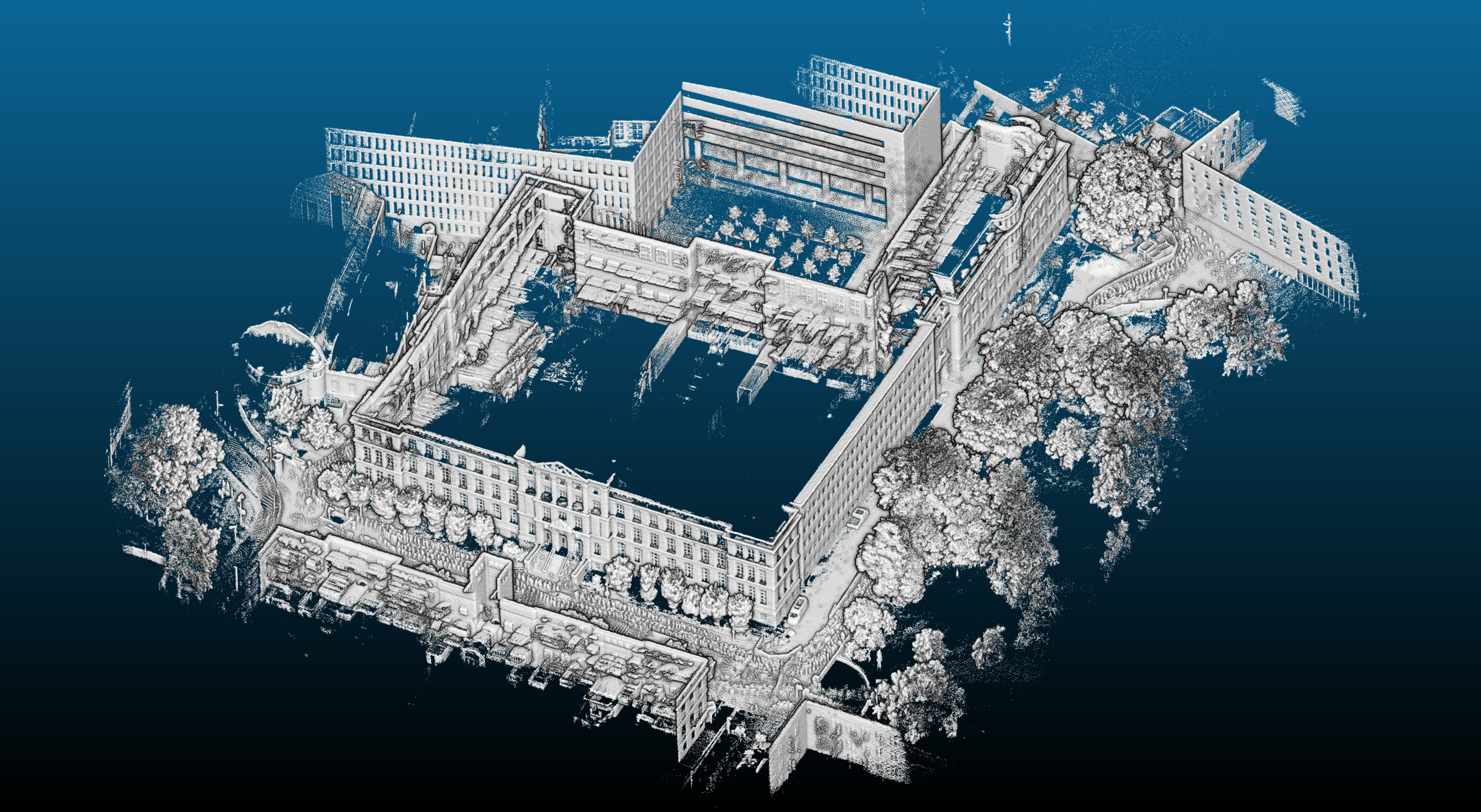
3D Point Cloud - Altes Hauptgebäude, TU Darmstadt
| dc.contributor.author | Daun, Kevin | |
| dc.contributor.author | Kohlbrecher, Stefan | |
| dc.date.accessioned | 2020-02-06T15:06:07Z | |
| dc.date.available | 2020-02-06T15:06:07Z | |
| dc.date.issued | 2017 | |
| dc.identifier.uri | https://tudatalib.ulb.tu-darmstadt.de/handle/tudatalib/2274 | |
| dc.identifier.uri | https://doi.org/10.48328/tudatalib-155 | |
| dc.description | 3D Point Cloud of the old main building at TU Darmstadt (S1|03, Hochschulstr. 1, 64289 Darmstadt, Germany). The raw data was captured with the Hector Tracker robot (http://www.teamhector.de/our-robot/51-hector-tracker) and processed using the Simultaneous Localization and Mapping approach developed by Kevin Daun based on Google Cartographer. The data set contains 186,896,629 points and the bounding box has a size of 220.2 m x 227.3 m 40.7 m. | en_US |
| dc.rights | Creative Commons Attribution-NonCommercial 4.0 | |
| dc.rights.uri | https://creativecommons.org/licenses/by-nc/4.0/ | |
| dc.subject | SLAM | en_US |
| dc.subject | Mobile robotics | en_US |
| dc.subject | 3D model | en_US |
| dc.subject | Point cloud | en_US |
| dc.subject.classification | 4.43-04 Künstliche Intelligenz und Maschinelle Lernverfahren | en_US |
| dc.subject.classification | 4.43-05 Bild- und Sprachverarbeitung, Computergraphik und Visualisierung, Human Computer Interaction, Ubiquitous und Wearable Computing | |
| dc.subject.ddc | 004 | |
| dc.title | 3D Point Cloud - Altes Hauptgebäude, TU Darmstadt | en_US |
| dc.type | Model | en_US |
| dc.type | Other | en_US |
| tud.tubiblio | 113766 | en_US |
| tud.history.classification | Version=2016-2020;409-05 Interaktive und intelligente Systeme, Bild- und Sprachverarbeitung, Computergraphik und Visualisierung |
Dateien zu dieser Ressource
![No Thumbnail [100%x60]](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9InllcyI/PjxzdmcgeG1sbnM9Imh0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnIiB3aWR0aD0iMTI2NCIgaGVpZ2h0PSI2MCIgdmlld0JveD0iMCAwIDEyNjQgNjAiIHByZXNlcnZlQXNwZWN0UmF0aW89Im5vbmUiPjwhLS0KU291cmNlIFVSTDogaG9sZGVyLmpzLzEwMCV4NjAvdGV4dDpObyBUaHVtYm5haWwKQ3JlYXRlZCB3aXRoIEhvbGRlci5qcyAyLjYuMC4KTGVhcm4gbW9yZSBhdCBodHRwOi8vaG9sZGVyanMuY29tCihjKSAyMDEyLTIwMTUgSXZhbiBNYWxvcGluc2t5IC0gaHR0cDovL2ltc2t5LmNvCi0tPjxkZWZzPjxzdHlsZSB0eXBlPSJ0ZXh0L2NzcyI+PCFbQ0RBVEFbI2hvbGRlcl8xOTY2NTNlOTRhNyB0ZXh0IHsgZmlsbDojQUFBQUFBO2ZvbnQtd2VpZ2h0OmJvbGQ7Zm9udC1mYW1pbHk6QXJpYWwsIEhlbHZldGljYSwgT3BlbiBTYW5zLCBzYW5zLXNlcmlmLCBtb25vc3BhY2U7Zm9udC1zaXplOjQ4cHQgfSBdXT48L3N0eWxlPjwvZGVmcz48ZyBpZD0iaG9sZGVyXzE5NjY1M2U5NGE3Ij48cmVjdCB3aWR0aD0iMTI2NCIgaGVpZ2h0PSI2MCIgZmlsbD0iI0VFRUVFRSIvPjxnPjx0ZXh0IHg9IjQwOC41IiB5PSI1Mi4yIj5ObyBUaHVtYm5haWw8L3RleHQ+PC9nPjwvZz48L3N2Zz4=)

![No Thumbnail [100%x60]](data:image/svg+xml;base64,PD94bWwgdmVyc2lvbj0iMS4wIiBlbmNvZGluZz0iVVRGLTgiIHN0YW5kYWxvbmU9InllcyI/PjxzdmcgeG1sbnM9Imh0dHA6Ly93d3cudzMub3JnLzIwMDAvc3ZnIiB3aWR0aD0iMTI2NCIgaGVpZ2h0PSI2MCIgdmlld0JveD0iMCAwIDEyNjQgNjAiIHByZXNlcnZlQXNwZWN0UmF0aW89Im5vbmUiPjwhLS0KU291cmNlIFVSTDogaG9sZGVyLmpzLzEwMCV4NjAvdGV4dDpObyBUaHVtYm5haWwKQ3JlYXRlZCB3aXRoIEhvbGRlci5qcyAyLjYuMC4KTGVhcm4gbW9yZSBhdCBodHRwOi8vaG9sZGVyanMuY29tCihjKSAyMDEyLTIwMTUgSXZhbiBNYWxvcGluc2t5IC0gaHR0cDovL2ltc2t5LmNvCi0tPjxkZWZzPjxzdHlsZSB0eXBlPSJ0ZXh0L2NzcyI+PCFbQ0RBVEFbI2hvbGRlcl8xOTY2NTNlOWQ2NiB0ZXh0IHsgZmlsbDojQUFBQUFBO2ZvbnQtd2VpZ2h0OmJvbGQ7Zm9udC1mYW1pbHk6QXJpYWwsIEhlbHZldGljYSwgT3BlbiBTYW5zLCBzYW5zLXNlcmlmLCBtb25vc3BhY2U7Zm9udC1zaXplOjQ4cHQgfSBdXT48L3N0eWxlPjwvZGVmcz48ZyBpZD0iaG9sZGVyXzE5NjY1M2U5ZDY2Ij48cmVjdCB3aWR0aD0iMTI2NCIgaGVpZ2h0PSI2MCIgZmlsbD0iI0VFRUVFRSIvPjxnPjx0ZXh0IHg9IjQwOC41IiB5PSI1Mi4yIj5ObyBUaHVtYm5haWw8L3RleHQ+PC9nPjwvZz48L3N2Zz4=)
Der Datensatz erscheint in:
-
Reconstructions [1]
Environment reconstructions and models

Solange nicht anders angezeigt, wird die Lizenz wie folgt beschrieben: Creative Commons Attribution-NonCommercial 4.0