
3D Point Cloud - Altes Hauptgebäude, TU Darmstadt
{kind=link}
{kind=link}
Date
2017Description
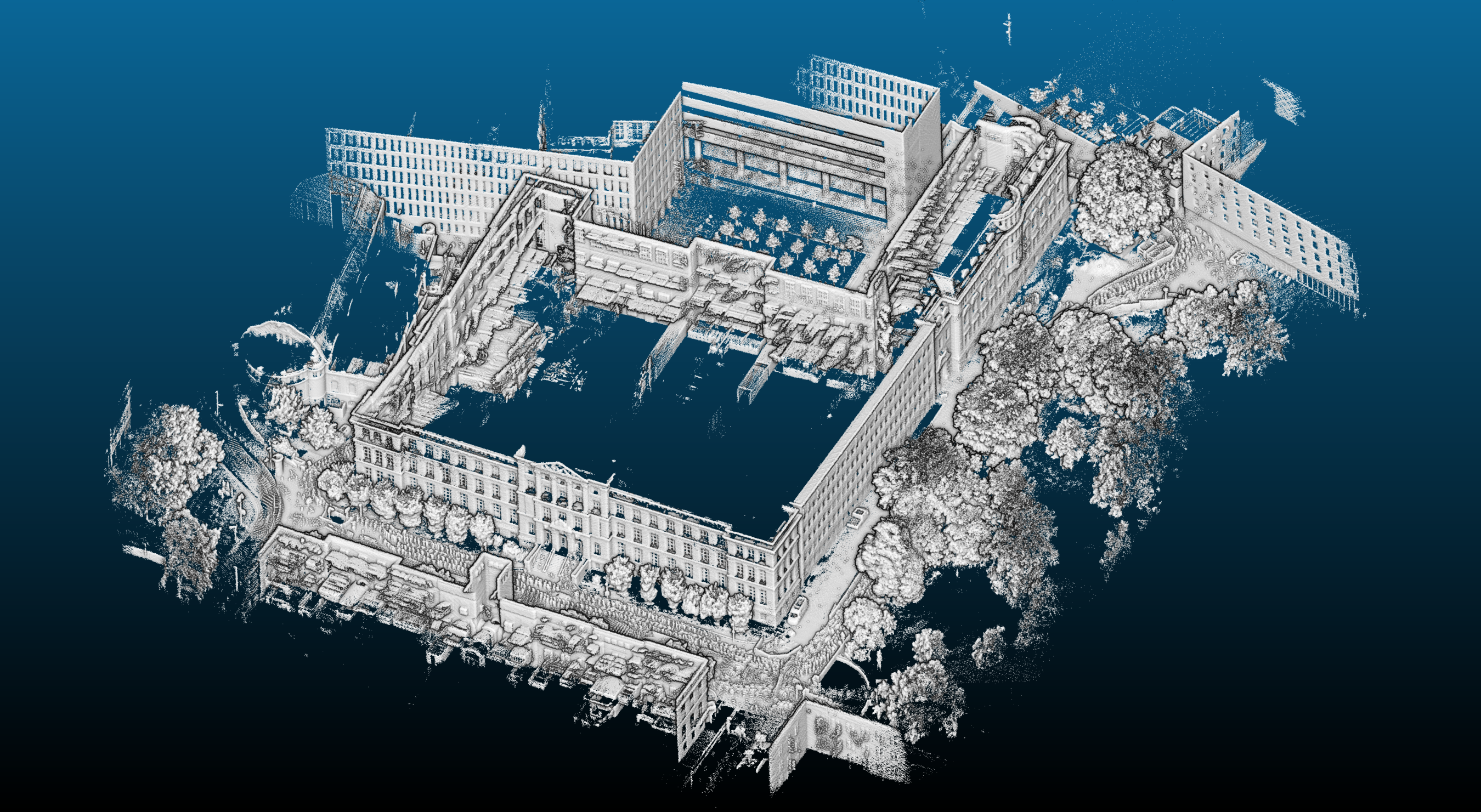
3D Point Cloud of the old main building at TU Darmstadt (S1|03, Hochschulstr. 1, 64289 Darmstadt, Germany).
The raw data was captured with the Hector Tracker robot (http://www.teamhector.de/our-robot/51-hector-tracker) and processed using the Simultaneous Localization and Mapping approach developed by Kevin Daun based on Google Cartographer.
The data set contains 186,896,629 points and the bounding box has a size of 220.2 m x 227.3 m 40.7 m.
DFG subject classification
4.43-04 Künstliche Intelligenz und Maschinelle Lernverfahren4.43-05 Bild- und Sprachverarbeitung, Computergraphik und Visualisierung, Human Computer Interaction, Ubiquitous und Wearable Computing
URI
https://tudatalib.ulb.tu-darmstadt.de/handle/tudatalib/2274https://doi.org/10.48328/tudatalib-155
Reference in TUbiblio
- Daun, Kevin (2017)Robust 3D SLAM for Mobile Search and Rescue Robots in Challenging Environments. Technische Universität DarmstadtMasterarbeit, Bibliographie[link]
Collections
-
Reconstructions [1]
The following license files are associated with this item:

Except where otherwise noted, this item's license is described as Creative Commons Attribution-NonCommercial 4.0