
DRZ Living Lab Tracked Robot SLAM Dataset
Beschreibung
Data set for the evaluation of SLAM systems in challenging terrains. The data set covers four sequences with challenging terrain, each tracked with a high-performance Qualisys optical motion capture system.
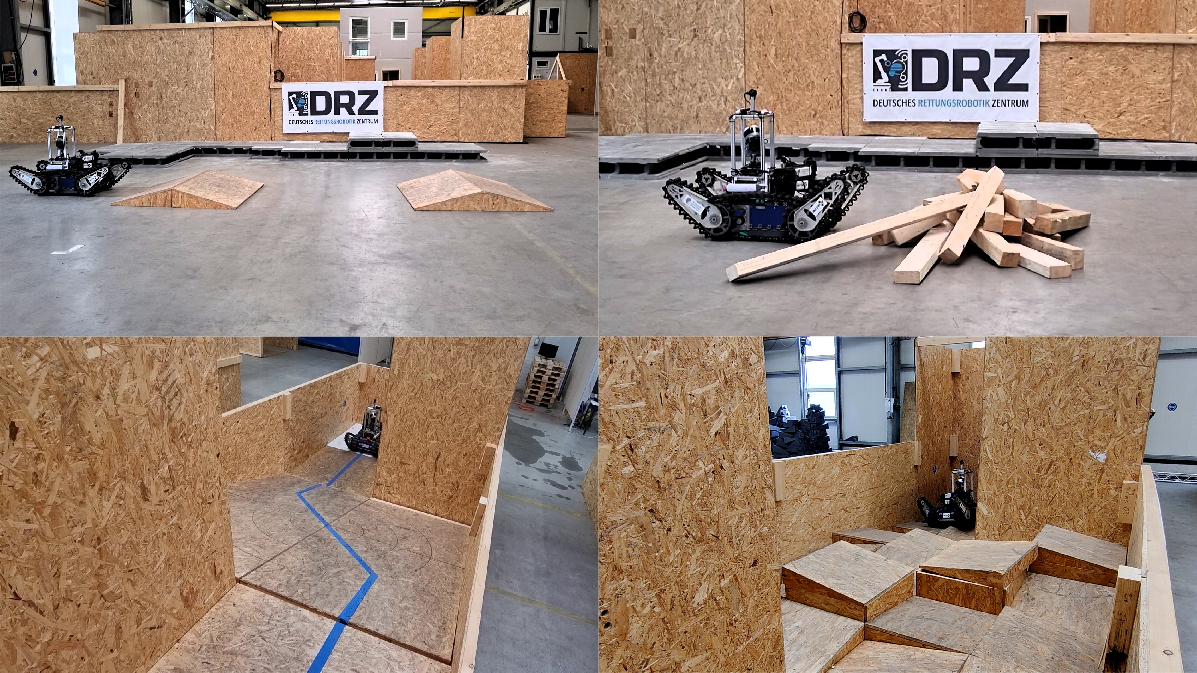
The four sequences contain
1) double pitch ramps, which induce a fast pitch motion when traversing
2) a loose woodpile which slips when traversed
3) the RoboCup Rescue League "Maneuvering 3 - Traverse" lane which contains a 2.4m long 30-degree incline
4) the RoboCup Rescue League "Mobility 4 - Elevated Ramps" lane containing a diagonal hill terrain consisting of 60 cm ramps with sloped tops.
The sequences are between 59 s and 149 s in duration.
Corresponding to the publication:
K. Daun, M. Schnaubelt, S. Kohlbrecher and O. von Stryk, "HectorGrapher: Continuous-time Lidar SLAM with Multi-resolution Signed Distance Function Registration for Challenging Terrain," 2021 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), New York City, NY, USA, 2021, pp. 152-159, doi: 10.1109/SSRR53300.2021.9597690 Add to Citavi project by DOI.
The four sequences contain
1) double pitch ramps, which induce a fast pitch motion when traversing
2) a loose woodpile which slips when traversed
3) the RoboCup Rescue League "Maneuvering 3 - Traverse" lane which contains a 2.4m long 30-degree incline
4) the RoboCup Rescue League "Mobility 4 - Elevated Ramps" lane containing a diagonal hill terrain consisting of 60 cm ramps with sloped tops.
The sequences are between 59 s and 149 s in duration.
Corresponding to the publication:
K. Daun, M. Schnaubelt, S. Kohlbrecher and O. von Stryk, "HectorGrapher: Continuous-time Lidar SLAM with Multi-resolution Signed Distance Function Registration for Challenging Terrain," 2021 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), New York City, NY, USA, 2021, pp. 152-159, doi: 10.1109/SSRR53300.2021.9597690 Add to Citavi project by DOI.
DFG-Fächer
4.43-04 Künstliche Intelligenz und Maschinelle Lernverfahren4.43-05 Bild- und Sprachverarbeitung, Computergraphik und Visualisierung, Human Computer Interaction, Ubiquitous und Wearable Computing
Zugehörige Drittmittelprojekte
Bund/BMBF | 13N14861 | A-DRZLOEWE initiative (Hesse, Germany) within the emergenCITY center
Verknüpfte Ressourcen
- Wird beschrieben durch: DOI:10.1109/SSRR53300.2021.9597690
Sammlungen
-
Lidar SLAM [2]
Die folgenden Lizenzbestimmungen sind mit dieser Ressource verbunden:

Solange nicht anders angezeigt, wird die Lizenz wie folgt beschrieben: Creative Commons Attribution 4.0