
Pose Prediction for Mobile Ground Robots Evaluation Dataset
Beschreibung
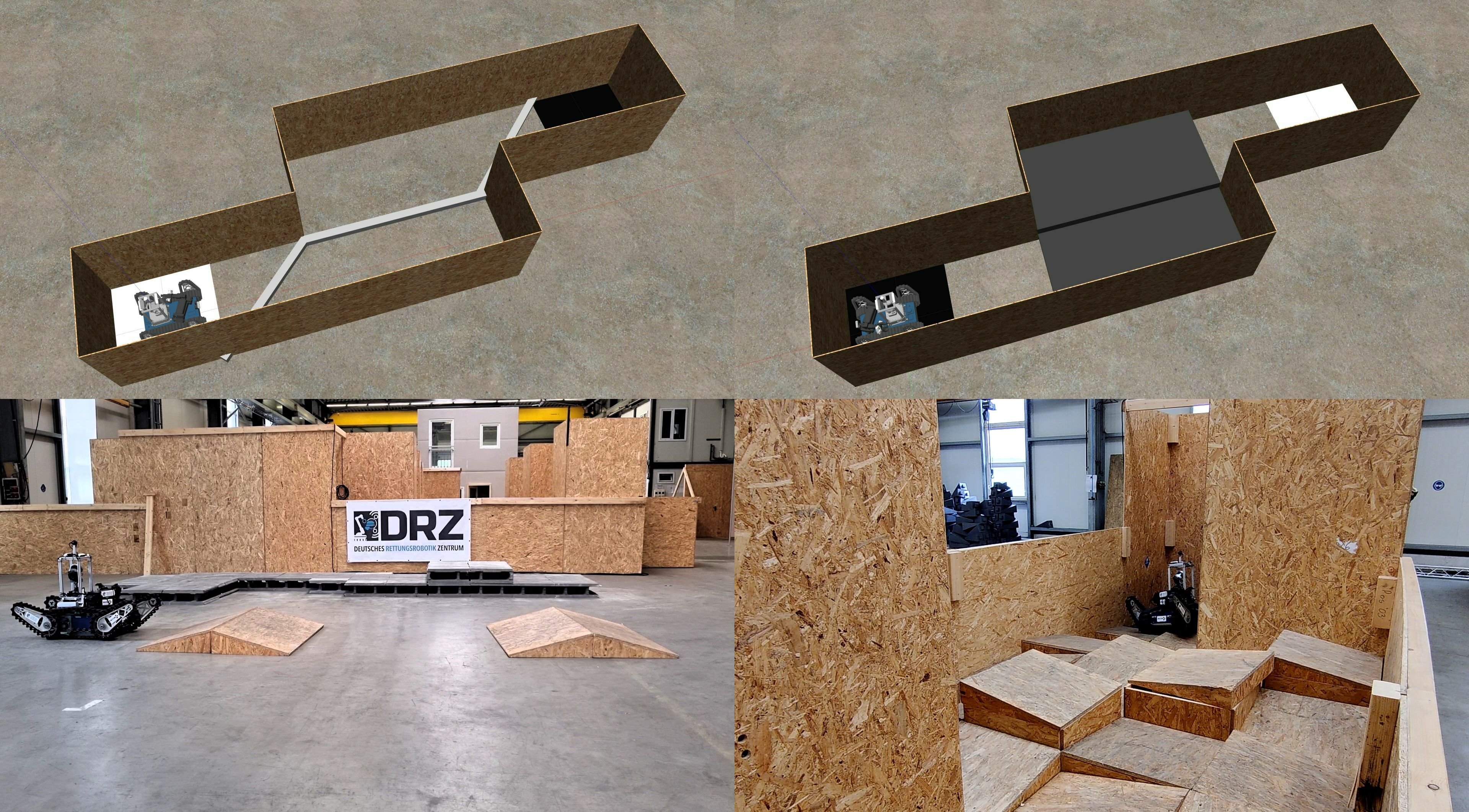
This dataset provides ground truth robot trajectories in rough terrain for the evaluation of pose prediction approaches for mobile ground robots. It is composed of six datasets in four different scenarios of the RoboCup Rescue Robot League (RRL):
* Continuous Ramps: Series of double ramps
* Curb: Three 10 x 10 cm bars on flat ground
* Hurdles: Steps of varying heights
* Elevated Ramps: Boxes of varying heights with sloped tops
Four datasets were created in the Gazebo simulator and two were recorded on a real robot platform in the DRZ Living Lab. Each dataset contains the ground truth robot poses of a path through the arena. In Gazebo, the ground truth poses are provided by the simulator. In the DRZ Living Lab, a high-performance Qualisys optical motion capture system has been used.
The data has been recorded using the tracked robot "Asterix". It is a highly mobile platform with main tracks and coupled flippers on the front and back and a chassis footprint of 72 × 52 cm.
The data is provided as Bagfiles for ROS and is intended to be used with the package hector_pose_prediction_benchmark.
This dataset is published as part of the publication:
Oehler, Martin, et al. "Accurate Pose Prediction on Signed Distance Fields for Mobile Ground Robots in Rough Terrain." 2023 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). IEEE, 2023.
See the provided README for further information.
* Continuous Ramps: Series of double ramps
* Curb: Three 10 x 10 cm bars on flat ground
* Hurdles: Steps of varying heights
* Elevated Ramps: Boxes of varying heights with sloped tops
Four datasets were created in the Gazebo simulator and two were recorded on a real robot platform in the DRZ Living Lab. Each dataset contains the ground truth robot poses of a path through the arena. In Gazebo, the ground truth poses are provided by the simulator. In the DRZ Living Lab, a high-performance Qualisys optical motion capture system has been used.
The data has been recorded using the tracked robot "Asterix". It is a highly mobile platform with main tracks and coupled flippers on the front and back and a chassis footprint of 72 × 52 cm.
The data is provided as Bagfiles for ROS and is intended to be used with the package hector_pose_prediction_benchmark.
This dataset is published as part of the publication:
Oehler, Martin, et al. "Accurate Pose Prediction on Signed Distance Fields for Mobile Ground Robots in Rough Terrain." 2023 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). IEEE, 2023.
See the provided README for further information.
DFG-Fächer
4.43-04 Künstliche Intelligenz und Maschinelle Lernverfahren4.43-05 Bild- und Sprachverarbeitung, Computergraphik und Visualisierung, Human Computer Interaction, Ubiquitous und Wearable Computing
Zugehörige Drittmittelprojekte
Bund/BMBF | 13N16274 | KIARAVerknüpfte Ressourcen
- Ist abgeleitet von: https://tudatalib.ulb.tu-darmstadt.de/handle/tudatalib/3973
- Wird beschrieben durch: DOI:https://doi.org/10.1109/SSRR53300.2021.9597690
Sammlungen
Die folgenden Lizenzbestimmungen sind mit dieser Ressource verbunden:

Solange nicht anders angezeigt, wird die Lizenz wie folgt beschrieben: Creative Commons Attribution 4.0